Министерство науки и
высшего образования
Российской Федерации
Российская Академия Наук
Отделение энергетики, машиностроения
механики и процессов управления
![]()
Федеральное государственное бюджетное учреждение науки
Институт машиноведения
им. А.А. Благонравова
Российской академии наук
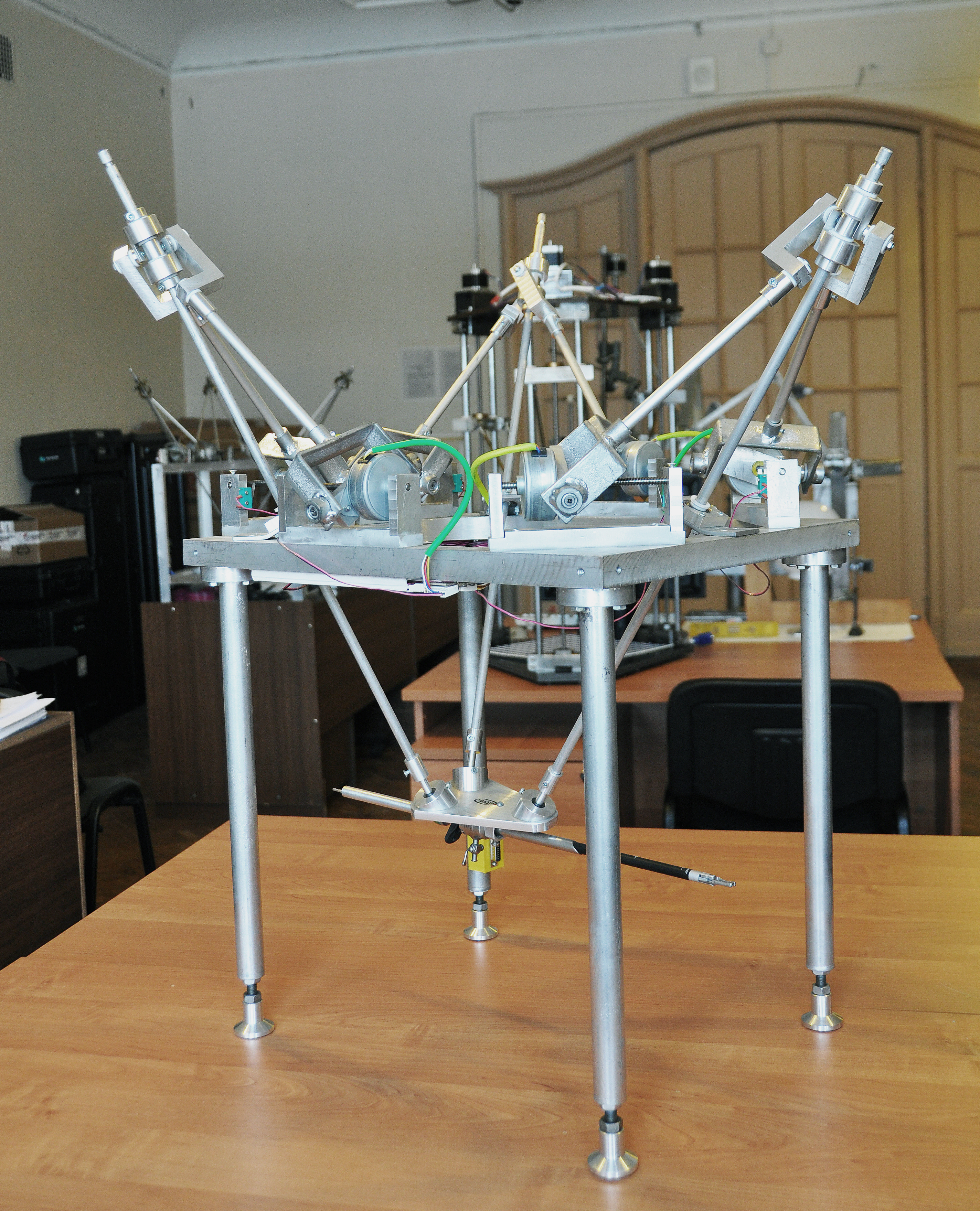
УНИВЕРСАЛЬНЫЙ МАНИПУЛЯТОР НА ОСНОВЕ ПРОСТРАНСТВЕННОГО МЕХАНИЗМА ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ.
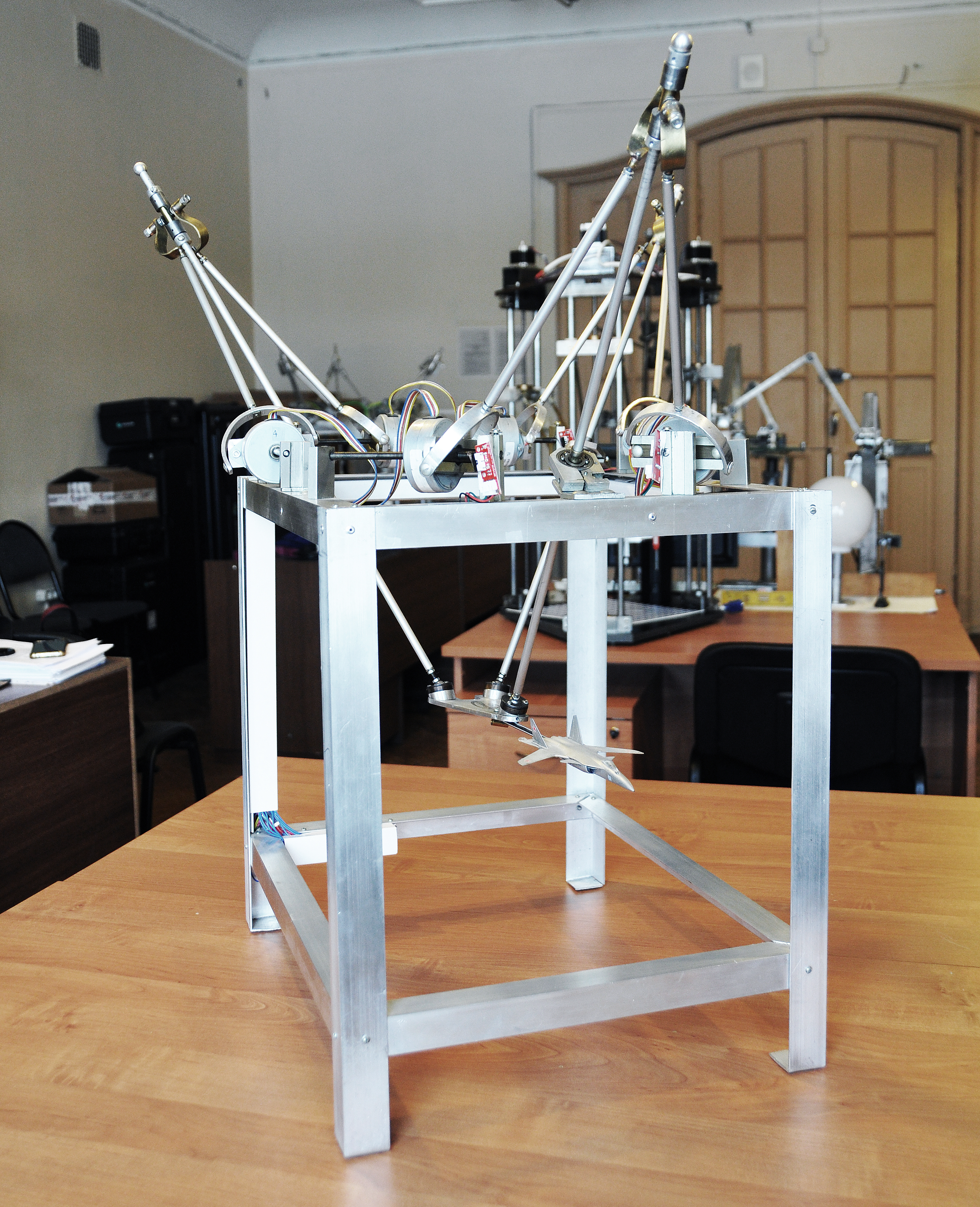
Уникальный механизм, разработанный в институте Машиноведения, предназначен для манипулирования макетом летательного аппарата в аэродинамической трубе. Обеспечивает перемещение макета в рабочей зоне трубы по трем координатам и его вращение относительно трех координатных осей.
При этом все шесть управляющих приводов вынесены за пределы рабочей зоны, а макет перемещается при помощи минимального количества стержней, введенных в рабочую зону. Такая компоновка позволяет минимизировать влияние посторонних элементов на аэродинамическую картину и увеличить точность измерения сил, действующих на макет со стороны воздушного потока.
Дополнительные преимущества обеспечивает возможность перемещения вдоль направления воздушного потока, что позволяет моделировать относительное перемещения двух и более объектов, например, самолета и запускаемой с него ракеты.
Универсальность манипулятора – в его пригодности для других задач, где требуется вынесение приводных механизмов за пределы рабочей зоны, в которой присутствие элементов механизма минимально. Это могут быть задачи работы в «особо чистых» зонах, создание медицинских манипуляторов и т. п.