
Министерство науки и
высшего образования
Российской Федерации
Российская Академия Наук
Отделение энергетики, машиностроения
механики и процессов управления
![]()
Федеральное государственное бюджетное учреждение науки
Институт машиноведения
им. А.А. Благонравова
Российской академии наук
imash.ru » Научные отделы ИМАШ » Механика машин и управление машинами » Структура Отдела » Лаборатория управления технологическими процессами и системами » Основные научные результаты и достижения » Научные результаты 2021-2023
Научные результаты 2021-2023 гг.
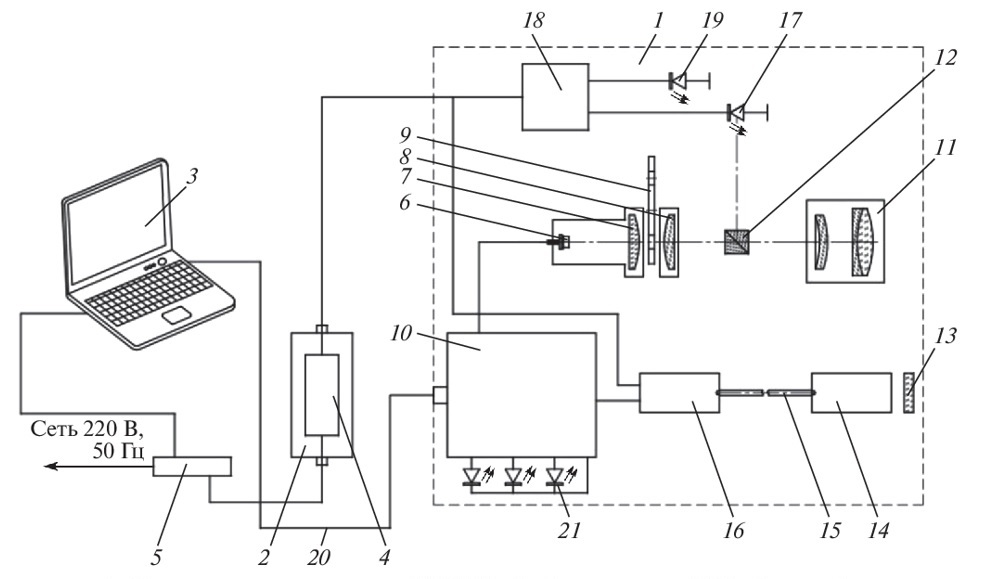
ТЕХНОЛОГИЧЕСКИЕ УСТАНОВКИ И СРЕДСТВА КОНТРОЛЯ И ПРОВЕРКИ ЛАЗЕРНЫХ ДАЛЬНОМЕРОВ

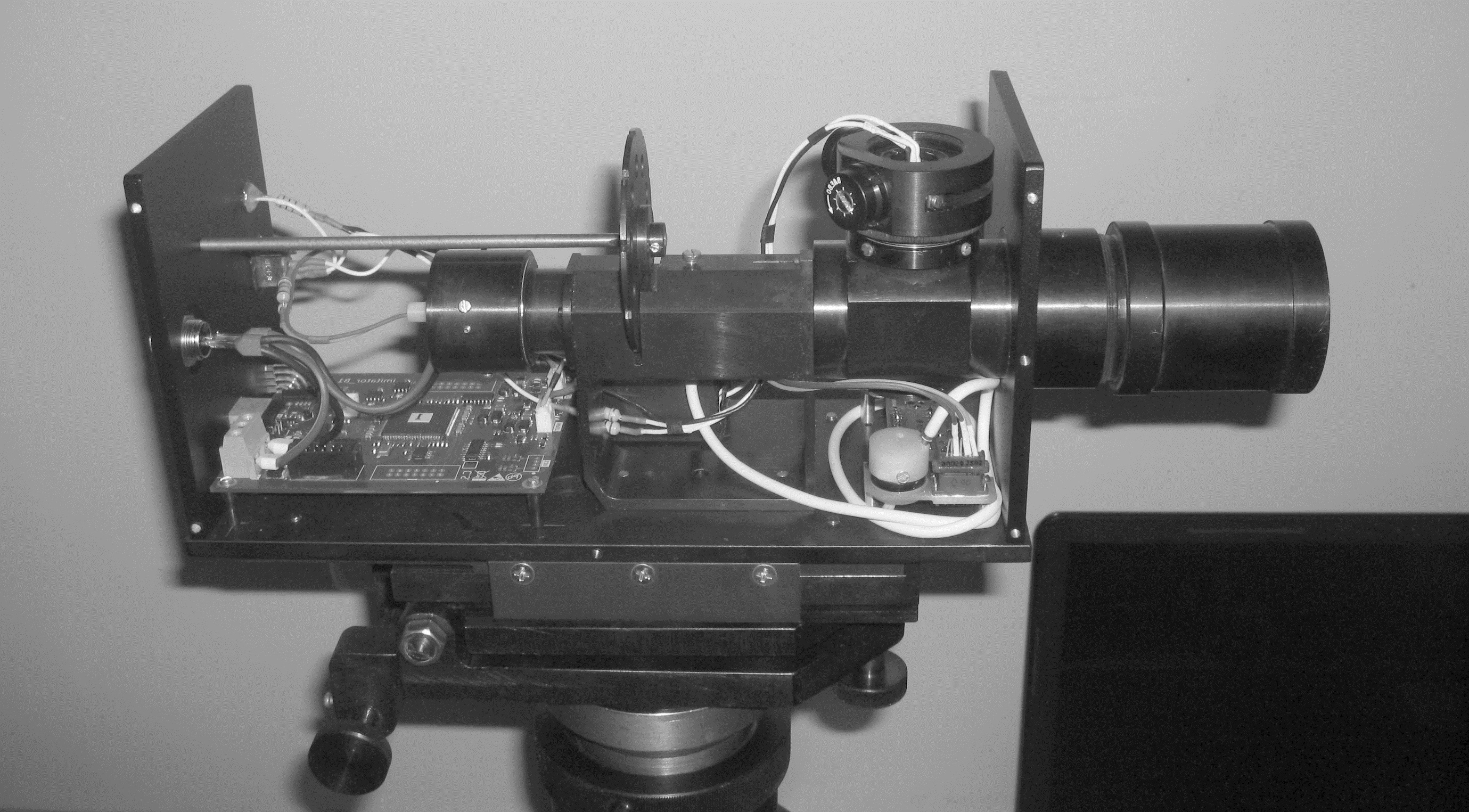

Структурная схема технологической установки для настройки и проверки лазерных дальномеров (ИЦФ)
.jpg)
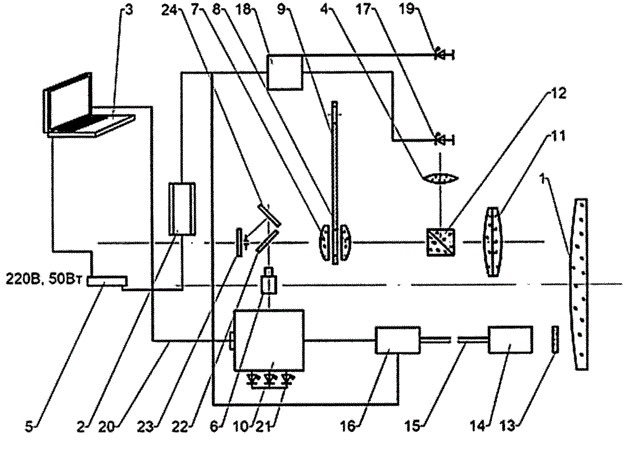
Структурная схема широкодиапазонное устройство для бестрассовой проверки параметров лазерных дальномеров
.jpg)
Награды на выставках «Архимед-2022» и «Архимед-2023»
.jpg)
.jpg)
Разработка технологии получения дисков ГТД из жаропрочных сплавов
методом раскатки в режиме сверхпластичности
.jpg)
Разработка технологии получения дисков ГТД из жаропрочных сплавов комбинированным методом давления с кручением в режиме сверхпластичности
).jpg)
.jpg)
Конструкция штампа для комбинированной деформации дисков ГТД с тонким полотном в изотермических условиях
.jpg)
Блок-схема системы управления пресса и встроенного штампа для изготовления дисков из жаропрочных сплавов комбинированным методом давления с кручением в изотермических условиях
.jpg)
.jpg)
Повышение точности роботизированной финишной абразивной обработки лопаток ГТД
| Актуальность |
Система перемещения и базирования обрабатываемых заготовок лопаток газотурбинных двигателей
|
| Точность полученных 3D-печатью заготовок лопаток ГТД ограничена толщиной слоя, наносимого в процессе формообразования и усадкой при использовании связующего полимера. Используемые в турбинных лопатках материалы имеют высокую твёрдость, что приводит к повышению трудоёмкости при фрезеровании, поэтому необходима финишная размерная абразивная обработка, для которой применяются промышленные роботы. Для обеспечения точности базирования заготовок предложена «Cистема перемещения и базирования обрабатываемых заготовок лопаток газотурбинных двигателей», содержащая приспособление-спутник для захвата обрабатываемых заготовок и устройство базирования приспособления-спутника в заданном положении, (патент на изобретение №2814637 РФ, рег. 04.03.2024, с приоритетом 31.05.2023 авторы Афонин В.Л., Смоленцев А.Н). |
Патент №2814637 РФ, рег. 04.03.2024
|
%20.JPG)
| Свойства | Механизм относительного манипулирования на основе вращательно-линейных модулей | Промышленный робот |
|
Схема устройства(кинематика и координаты в кинематических парах)
|
%20.JPG) |
%20.JPG) |
| Калибровка | Полная геометрическая модель | Настройка на зону обработки |
| Инструмент | Универсальный шлифовальный круг | Несколько видов инструмента (круги, фреза, ленточно-полировальная установка). |
|
Захватное устройство и накопитель
|
Захват приспособления-спутника (патент) с заготовкой лопатки может быть обеспечен движениями манипулятора перемещения детали. | Для захвата приспособления-спутника с заготовкой лопатки требуется дополнительное захватное устройство, а также система базирования (патент). |
| Формирование траектории | С учётом данных, получаемых от системы контроля. Предложен способ увеличения контактной области с инструментом, который проверен моделированием и может применяться при разработке САПР. |
| Преимущества применения системы в составе устройства | Повышение точности обработки компенсацией погрешности при захвате заготовки роботом за счёт упругой деформации устройства базирования заготовок (гнезда накопителя), обеспечивает точность и жёсткость захвата приспособления-спутника с заготовкой. |
.jpg)