
Министерство науки и
высшего образования
Российской Федерации
Российская Академия Наук
Отделение энергетики, машиностроения
механики и процессов управления
![]()
Федеральное государственное бюджетное учреждение науки
Институт машиноведения
им. А.А. Благонравова
Российской академии наук
Механизмы параллельной структуры,синтезированные д.т.н., проф. А.Ф. Крайневым и д.т.н., проф. В.А. Глазуновым. |
|||
| Шестиподвижный манипулятор для передачи движения в герметизированное пространство | Система относительного манипулирования в станке для лазерной обработки | ||
 |
 |
||
| Трехприводный механизм с поступательным движением выходного звена | Шестиподвижный манипулятор для микроперемещений на основе многоподвижных упругих соединений | ||
 |
 |
||
| Подробнее | |||
{kind=link}
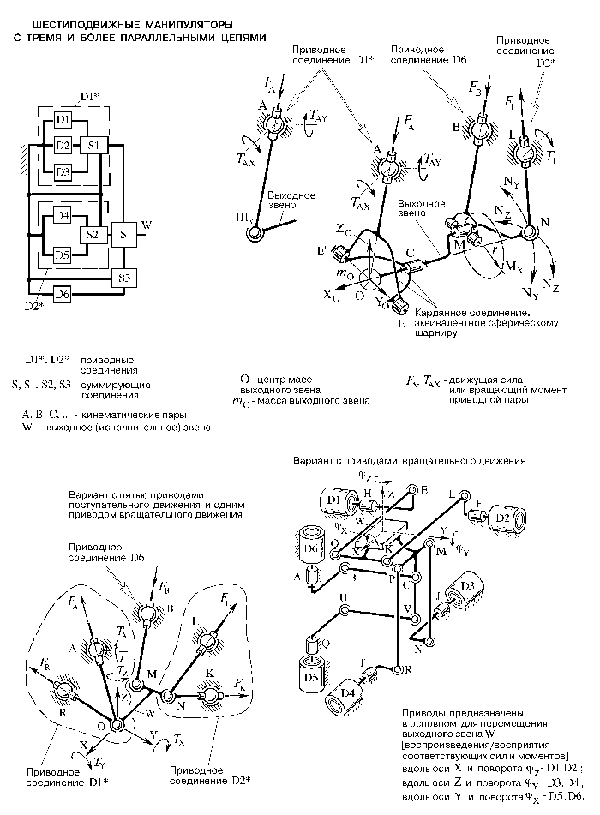
В Лабораториях машин-автоматов и теории механизмов и структуры машин разработаны и изготовлены макеты механизмов параллельной структуры с 6-ю степенями подвижности.
Данные механизмы имеют три блока приводов, каждый из которых реализует соосные поступательное и вращательное движения. С их помощью проводятся исследования свойств механизмов в положениях, близких к особым, проверяются алгоритмы управления рабочим органом механизма.
Исполнители: д.т.н., проф. Глазунов В.А., к.т.н. Серков Н.А., к.т.н. Тывес Л.И., Шалюхин К.А., к.т.н. Левин С.В., асп. Данилин П.О.